|
| 26 November 2011: Mars Science Laboratory rover Curiosity lifts off from Space Launch Complex 41 at Cape Canaveral Air Force Station, Florida, atop an Atlas V 541 medium-lift expendable rocket. The first launches of the HERRO mission in late 2030-early 2031 would see three Atlas V or equivalent rockets each launch a Truck rover bearing two Rockhound rovers to Mars. The three Truck/Rockhound combinations would land in widely separated 100-kilometer-diameter exploration regions. A six-person HERRO crew would arrive in Mars orbit in 2033 to begin a 549-day stay, during which they would remotely operate (that is, teleoperate) the rovers to explore the three regions. Image credit: NASA. |
This (long) post outlines the most recent (2009) high-level NASA plan for landing humans on Mars. Called Design Reference Architecture (DRA) 5.0, it embraces long-held expectations regarding the role of astronauts in Mars exploration; the most significant of these is that when astronauts are dispatched to Mars for the first time they will land on its surface.
The post then describes an alternative piloted Mars mission concept, called Human Exploration Using Real-Time Robotic Operations (HERRO), which could serve as an interim step designed to place on firmer ground planning for a follow-on piloted Mars landing mission. The HERRO concept could in fact provide data that would enable us to make an essential determination; that is, whether the traditional goal of humans on Mars remains a desirable one.
In January 2007, NASA began efforts to update Design Reference Mission (DRM) 4.0, its plan for a piloted Mars landing mission. DRM 4.0 was based mostly on work performed in the 1998-2001 period. The updated DRM, the aforementioned DRA 5.0, was developed by the Mars Architecture Working Group (MAWG), which drew its more than 100 members from across NASA. The MAWG worked under the guidance of the Mars Architecture Steering Group (MASG). DRA 5.0 was formally published in July 2009.
The term "Architecture" replaced the term "Mission" when referring to DRA 5.0 in part to signal a shift in NASA's plans for an evolutionary program of scientific space exploration. In addition to multiple piloted Mars landing missions, DRA 5.0 sought to include International Space Station (ISS) missions, piloted lunar exploration in the Constellation Program, and robotic Mars missions including Mars Sample Return (MSR) missions.
DRA 5.0 scheduled its first piloted Mars landing for the late 2030s. Taking into account plans to cancel the Space Shuttle in 2010 that were hatched in the aftermath of the February 2003 Columbia accident, it replaced NASA's venerable semi-reusable winged crew and cargo spacecraft with the Ares I rocket for launching Orion crew vehicles and the Ares V heavy-lift rocket for launching cargo. The rockets, both under development in 2007, were to be derived from Shuttle hardware. Though named for the Greek god the Romans renamed Mars, the Ares rockets were primarily designed with Constellation Moon missions in mind.
In documents used as sources for this post there occur discrepancies in spacecraft designs, weights, sizes, and other particulars. For example, a document will on one page display a spacecraft assembly sequence that requires three Ares V launches; on another page of the same document, the text will then describe an assembly sequence that requires four Ares Vs.
These discrepancies are not explained, though they might reflect changing energy requirements for Earth-Mars and Mars-Earth minimum-energy transfers. Mars has a decidedly elliptical orbit about the Sun, so the energy required to visit and return from it changes markedly from one minimum-energy Earth-Mars transfer opportunity to the next; such opportunities occur every 26 months. To avoid confusion, in most cases in this post the DRA 5.0 and HERRO spacecraft appear in the forms that occur most often in their respective study documents.
 |
| The Shuttle-derived Ares I crew rocket (left) and Ares V cargo rocket as envisioned in 2009. Mars DRA 5.0 would require a minimum of three Ares I rockets and 21 Ares V rockets launched over a period of about eight years to explore three 100-kilometer-diameter exploration regions on Mars. In addition to the three medium-lift rockets described in the image at the top of this post, the HERRO mission would need one Ares I rocket and four Ares Vs to explore three 100-kilometer-diameter regions. Twenty-six months would separate the medium-lift rocket launches from the HERRO Ares I and Ares V launches; the Ares Vs would be launched and their payloads joined in Earth orbit over a period of about five days. Image credit: NASA. |
A DRA 5.0 mission would begin with four Ares V launches from NASA Kennedy Space Center (KSC) in Florida. Two Ares Vs would each boost into low-Earth orbit a 28.8-meter-long, 96.6-ton Nuclear-Thermal Rocket (NTR) core stage. The NTR stage would contain liquid hydrogen actively cooled to prevent boiloff. Two more Ares Vs would each place into orbit an approximately 64-ton payload packaged inside a 30-meter-long Mars aeroshell with a mass of about 43 tons. In addition to enabling aerocapture and atmosphere entry at Mars, the bullet-shaped "triconic" aeroshells would serve as streamlined Earth launch shrouds.
The stages and aeroshells would rendezvous and dock autonomously in low-Earth orbit to form an outwardly identical pair of cargo spacecraft. Neither spacecraft would carry a crew as it ignited its three 25,000-pound-thrust NTR engines to begin a minimum-energy Earth-Mars transfer lasting about 350 days.
Near Mars, the two cargo spacecraft would cast off their NTR core stages. One aeroshell, containing a 63.7-ton Mars Descent/Ascent Vehicle (MDAV) lander, would perform an aerocapture maneuver in the thin martian atmosphere to slow itself so that the planet's gravity could capture it using minimal propellants; then, after rising to apoapsis (orbit high point), it would reenter the atmosphere.
After any aeromaneuvers required to reach its preselected landing site, the MDAV would discard its two-part aeroshell, ignite descent rockets, and land in a level area near the center of a 100-kilometer-diameter exploration region. Orbital mechanics and aeromaneuvering limitations would mean that DRA 5.0 landers could not land at high-latitude and polar sites.
Following touchdown, the MDAV would deploy a nuclear power system on a robotic cart. Trailing cables, it would move a safe distance away from the landing site before power system activation. The MDAV would then begin splitting carbon dioxide drawn from the atmosphere to fill its empty oxidizer tanks with liquid oxygen. The first Mars mission crew would not leave Earth if the MDAV failed to fill its tanks.
The other aeroshell, containing a 64.3-ton Surface Habitat (SHAB) lander, would not land immediately. Instead, it would ignite rocket motors at apoapsis to raise its periapsis (orbit low point) out of the martian atmosphere and achieve a stable orbit. There it would remain awaiting arrival of the first six-person DRA 5.0 Mars landing crew in about 18 months.
 |
| The spacecraft at the top in the illustration above is the DRA 5.0 Mars Transfer Vehicle (MTV) for carrying the crew to and from Mars orbit; the spacecraft at the bottom could be either of the two cargo spacecraft. They are shown as they would appear in Earth orbit just before departure for Mars. Image credit: NASA. |
The Mars Transfer Vehicle (MTV) bearing the first crew would leave Earth orbit 26 months after the first two cargo spacecraft. In the months prior to departure, three Ares V rockets would place into low-Earth orbit an NTR core stage, a "saddle-shaped" truss structure containing a drop tank, and a "supporting payload." They would rendezvous and dock autonomously. The completed MTV would measure 96.7 meters in length and have a mass of 356.4 tons.
The supporting payload, located at the front of the newly assembled MTV, would include four solar arrays and an inflatable Transhab crew module with a docking port at its front. Within a short saddle truss mounted behind the Transhab the supporting payload would include a cylindrical contingency food container and a backup docking port.
The food container would be called into play if the astronauts could not land on Mars; in that event, they would be required to remain on board the MTV in Mars orbit long enough for Earth and Mars to align to permit a minimum-energy Mars-Earth transfer, a period of about 500 days. Its contents might also be put to use if, after landing successfully on Mars, the crew had to evacuate the surface early.
The food container was not the only contingency hardware included in DRA 5.0. At the time NASA launched the first MTV, it would also launch four more Ares V rockets carrying two NTR core stages and two aeroshells containing MDAV and SHAB landers. The latter would be virtually identical to the first pair launched 26 months earlier. The NTR stages and aeroshell/lander combinations would autonomously dock in orbit to form two more cargo spacecraft.
The second set of cargo spacecraft would be intended to serve the crew of the second Mars landing mission, which would leave Earth orbit in the second MTV 26 months after the first. They could, however, also serve as backups for the first Mars landing crew's MDAV and SHAB landers. They would reach Mars about 170 days after the first crew. If the first crew were required to use them, the second crew's departure from Earth would be delayed until a third set of cargo spacecraft could reach Mars.
With the MTV assembled in Earth orbit, the first Mars landing crew would lift off in an uprated Orion spacecraft atop an Ares I rocket. They would dock their nine-meter-long crew transport, developed for the Constellation lunar program, with the MTV front docking port on the inflated Transhab, then would enter the MTV and check out its systems. A standard Orion atop an Ares I and a repair crew would stand by at NASA KSC, ready to provide assistance if the MTV failed its orbital checkout.
An alternate launch configuration would see the uprated long-lived Orion boosted to Earth orbit on an Ares V rocket as part of the supporting payload. In that case, the crew, launched separately in a standard Orion on an Ares I, would dock with the MTV's backup docking port. The standard Orion used for crew delivery would be cast off before the MTV left Earth orbit for Mars.
Assuming the MTV passed orbital checkout, its three NTR engines would ignite to perform a 57.8-minute Trans-Mars Injection (TMI) burn. The crew would then settle in for a weightless Earth-Mars transfer lasting about 180 days.
As Mars loomed large ahead, the MTV's NTR engines would fire for 16 minutes to slow it so the planet's gravity could capture it into orbit. Following the Mars Orbit Insertion (MOI) burn, the crew would mothball the MTV and transfer in the Orion spacecraft to the orbiting SHAB. After a successful SHAB checkout, the astronauts would command the Orion to undock, then would fire the SHAB's deorbit engines. Following reentry, aeromaneuvers, aeroshell separation, and descent, the SHAB bearing the crew would land near the MDAV. The Orion, meanwhile, would return to the MTV, dock, and shut itself down.
After six weightless months in interplanetary space, the crew would need to adapt to life in Mars surface gravity, which is a little more than a third as strong as Earth surface gravity. Drawing on advice from a 13-member Human Health and Performance Team, the MAWG/MASG opted for a one-month acclimatization period after landing, during which the astronauts would inflate the SHAB habitat and perform other "initial setup" activities, such as deploying crew rovers. The MAWG/MASG assumed that Mars gravity — possibly in combination with an exercise regimen — would be sufficient to maintain astronaut health. This would not, however, have been shown to be correct before the first Mars landing mission.
 |
| A Mars DRA 5.0 landing site. At left, in the middle distance, stands the MDAV beside an unpressurized crew rover. In the foreground at right, a small pressurized crew rover stirs up dust as it crawls over the surface. Behind it stands the SHAB lander, the six-person crew's home on Mars for about 500 days, with a second pressurized crew rover to its right and an unpressurized (possibly robotic) rover nearby. Image credit: NASA. |
The overriding objective of the DRA 5.0 surface missions would be acquisition of scientific knowledge. This would take in goals which have historically been among the most significant justifications of space exploration. All would be related through the science of geology since rocks can serve as recording devices for those who can read them. Goal I would focus on whether life ever arose on Mars, while Goal II would emphasize Mars climate history and processes. The most overtly geological would be Goal III, which would focus on the evolution of the surface and interior of Mars.
The MAWG/MASG examined three candidate Mars surface mission strategies. The Mobile Home strategy assumed the presence of large robust pressurized crew rovers towing trains of trailers bearing exploration equipment, including a drill rig for sampling the subsurface to a depth of hundreds of meters. The astronauts in the rovers would range for hundreds of kilometers over the martian surface.
The less-ambitious Commuter strategy — the strategy the MAWG/MASG selected for DRA 5.0 Mars surface missions — would see reliance on a pair of "modest" pressurized rovers, two unpressurized rovers, and a trailer-mounted drill rig for sampling tens of meters beneath the martian surface. Prior to carrying out a series of monthly 100-kilometer traverses, each lasting up to two weeks, supply caches would be placed along prospective exploration traverse routes. How this would be accomplished was not explained in detail.
The Commuter pressurized rovers would be designed to carry two astronauts under normal operating conditions or four astronauts if a rover broke down far from the SHAB and its crew needed rescue. The "nimble" rovers would place astronauts in bulky Mars surface space suits within reach of diverse surface features of geologic interest, thus satisfying science requirements while limiting risk to Mars-walking astronauts.
Both the Mobile Home and Commuter strategies would collect large quantities of samples which would be returned to the SHAB for analysis. About 250 kilograms of the most scientifically important samples would be retained for return to Earth; the remainder would be discarded. The MAWG/MASG expressed concern that 250 kilograms of samples might not fit readily into the MDAV ascent stage or the Orion capsule used to reenter Earth's atmosphere at the end of the mission.
The Mobile Home and Commuter strategies would face other operational challenges. Crews would not be able to rove far afield at times of heightened solar activity lest they suffer excessive radiation exposure. Even assuming advanced technology for generating and storing electricity, roving was not likely to occur every day during a traverse. The MAWG/MASG determined that, even if the pressurized rover moved as slowly as half a kilometer per hour, it might need to park every other day and deploy solar arrays with 400 square meters of area — which would extend for 40 meters in all directions from the rover — to make enough electricity to recharge its batteries after a day of driving.
Possibly the most significant challenge from a scientific standpoint for DRA 5.0 astronauts would be observance of planetary protection protocols. The MAWG/MASG assumed that "Special Regions" on Mars where organisms might reside could be identified in advance of the piloted Mars landing missions based on data from robotic precursor missions. Such regions would only be explored using sterilized rovers remotely operated in real time (that is, teleoperated) by astronauts in the SHAB.
The third candidate surface exploration strategy, dubbed Telecommuter, received the least attention of the three described in the DRA 5.0 report. It would see astronauts in shirtsleeves in the SHAB rely mostly on teleoperated rovers to explore Mars; in-person astronaut exploration would be limited to places accessible from the SHAB on foot or using unpressurized rovers that might travel at most 20 kilometers during a traverse.
The MAWG/MASG expected that deep drilling and extensive surface sampling would be extremely difficult within the confines of the Telecommuter strategy. On the plus side, the sterilized teleoperated rovers could venture with impunity anywhere on the surface of Mars without violating planetary protection rules.
Regardless of which surface strategy was used, after about 500 days on Mars the first DRA 5.0 astronauts would enter the MDAV ascent stage and ignite its engines to begin ascent to the MTV waiting in Mars orbit. The ascent engines would use the oxygen the MDAV collected from the martian atmosphere to burn methane it had brought from Earth. After docking and transfer to the MTV, the astronauts would cast off the MDAV ascent stage. They would also discard the contingency food canister after filling it with waste.
The crew would then fire the NTR core stage engines for 10.7 minutes to perform Trans-Earth Injection (TEI). Following a six-month Mars-Earth transfer, the astronauts would board the uprated Orion, undock, and perform a burn that would bend its course to intersect Earth's atmosphere. They would then cast off the Orion service module. As the crew reentered the atmosphere and descended to a landing, the vacant MTV would swing past Earth and enter a graveyard orbit about the Sun.
Before the first DRA 5.0 crew returned to Earth, the second crew would set out for Mars. They would land in a new 100-kilometer-diameter exploration region in the equatorial or mid-latitudes. The third crew would depart Earth to visit a third such region before the second crew left Mars. The third crew's return to Earth, about eight years after the first DRA 5.0 mission began, would complete the initial scientific exploration of Mars by astronauts.
The MAWG/MASG anticipated that the first three DRA 5.0 missions would together serve as a prudent stepping stone to Mars missions four through 10. These follow-on missions would, the DRA 5.0 report explained, see a "sustained human presence" on Mars, but they were otherwise undefined.
While the MAWG/MASG put the finishing touches on DRA 5.0, engineers and scientists at NASA Glenn Research Center (GRC), Case Western Reserve University, and Carnegie Mellon University prepared a preliminary plan for a piloted Mars mission that would carry the Telecommuter strategy to its logical conclusion. HERRO — which, it will be recalled, stands for Human Exploration Using Real-Time Robotic Operations — would see six astronauts on board a Crew Telerobotic Control Vehicle (CTCV) in elliptical Mars orbit explore three widely separated 100-kilometer-diameter regions on Mars using teleoperated Truck and Rockhound rovers. The CTCV would operate much as does an ocean research ship on Earth and the Trucks and Rockhounds would explore Mars's surface much as Remotely Operated Vehicles deployed from a research ship explore the ocean depths.
HERRO — it might be called "DRA 5.0 Telecommuter on steroids" — was intended as a prudent step toward Mars DRA 5.0, not a substitute. The HERRO study team argued that NASA needed to add interim steps to gain experience and knowledge ahead of piloted Mars landings. They noted, for example, that in 2009 no data existed on whether humans could remain healthy in Mars gravity for 500 days (this remains true at this writing). Assuming that they could without supporting data could make investment in piloted Mars landers, crew rovers, and surface suits a costly gamble.
Several of the NASA GRC engineers who participated in the MAWG also took part in the three-month HERRO study, which was performed under the auspices NASA's 2009 Innovative Partnerships Program. In fact, their participation in the DRA 5.0 and HERRO studies overlapped in time. They were thus well positioned to integrate HERRO and DRA 5.0.
As described in the picture caption at the top of this post, a HERRO Mars mission would begin with launch of three medium-lift rockets. Each would carry an aeroshell containing a Truck rover bearing two Rockhound rovers. The three launches might occur in late 2030.
The HERRO team sought to employ technology under development for NASA robotic Mars missions in their mission design. The Truck/Rockhound combinations would each ride to Mars in an aeroshell similar to that designed for Mars Science Laboratory Curiosity, which at the time of the HERRO study in 2009 was scheduled to launch to Mars in 2011. They would land using skycrane systems similar to the one expected to gently lower Curiosity to Mars's surface in 2012.
Two Truck/Rockhound combinations would land on opposite sides of Mars at sites near the center of their assigned exploration regions. The third would land in a south polar region.
 |
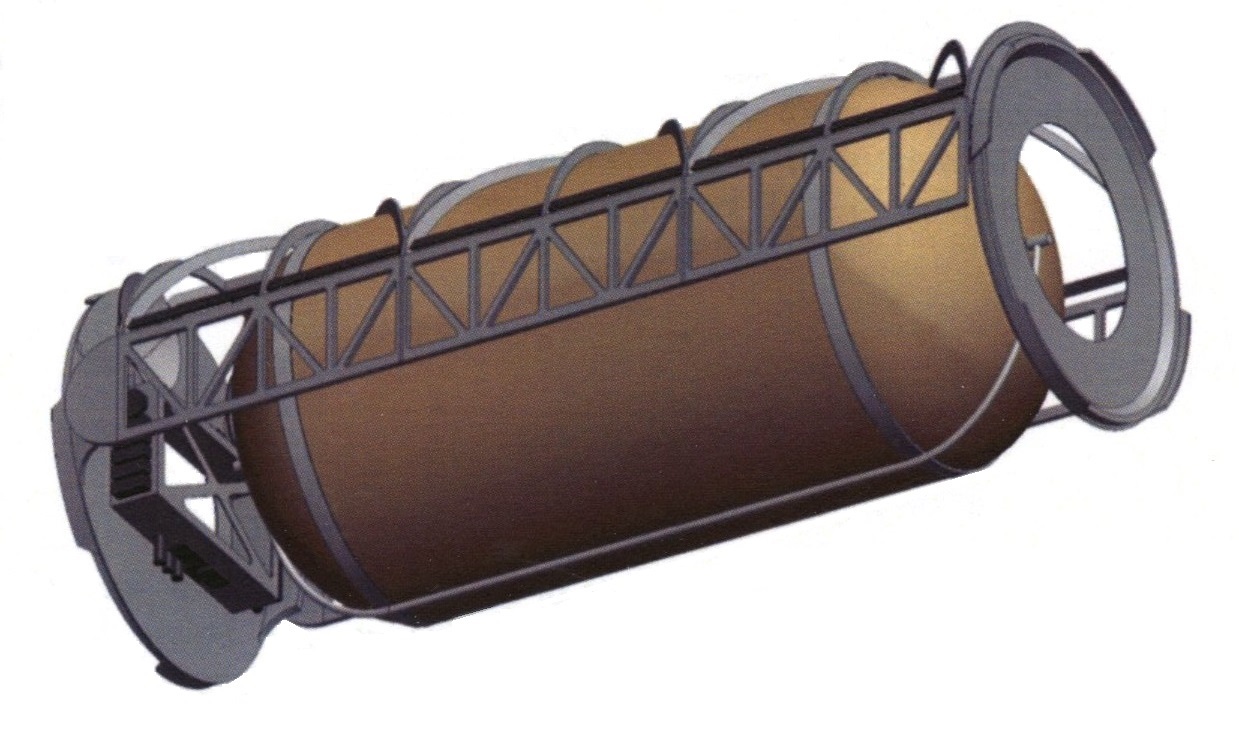
| Truck rover with Rockhound rovers packed within an aeroshell derived from that of the Mars Science Laboratory Curiosity rover. The skycrane landing system, which would ride atop the Truck, is not shown. Image credit: NASA. |
If the three Truck/Rockhound combinations left Earth in 2030, the CTCV bearing the crew would depart for Mars in early 2033. The HERRO study team described a CTCV resembling the DRA 5.0 MTV that would require four Ares V launches. The first would place into low-Earth orbit a 24.8-meter-long, 51.6-ton supporting payload outwardly similar to that of the DRA 5.0 MTV apart from the addition of two large dish antennas for transmitting large quantities of data to Earth. The antennas would need to be deployed before the Transhab could be inflated.
The second Ares V would place in orbit a 26.1-meter-long, 135.8-ton saddle truss and drop tank. Again, it would differ from its DRA 5.0 counterpart mainly by the presence of two antennas, this time for transmitting to and receiving from the Trucks and Rockhounds on Mars large quantities of real-time data.
The third Ares V rocket would launch into Earth orbit a 26.6-meter-long, 136-ton in-line propellant tank and the fourth a 29.9-meter-long, 132-ton NTR core stage outwardly identical to the one on the DRA 5.0 MTV. Supporting payload, saddle truss and drop tank, in-line tank, and NTR core stage would then rendezvous and dock autonomously in low-Earth orbit to form the 106.9-meter-long, 455.4-ton CTCV.
 |
| CTCV supporting payload. The deflated Transhab with docking port and large antennas is at right; the small saddle truss with food canister, docking port, and twin solar arrays (shown here folded) is at left. Image credit: NASA. |
 |
| Saddle truss with drop tank. The twin dish antennas for transmitting to and from the Truck and Rockhound rovers on Mars are stowed on the disc-shaped docking structure at left. Image credit: NASA. |
 |
| CTCV in-line propellant tank. Image credit: NASA. |
 |
| Nuclear-Thermal Rocket core stage with three engines. The CTCV could complete its mission with only two functioning engines. Image credit: NASA. |
 |
| Fully assembled HERRO CTCV with deployed antennas, inflated Transhab, and docked long-lived Orion (right). Image credit: NASA. |
The HERRO crew, which would comprise four geologists and two pilots, would lift off from Earth atop an Ares I rocket in an uprated, long-lived Orion spacecraft and rendezvous and dock with the CTCV front docking port on the Transhab. After CTCV checkout they would ignite the three NTR core stage engines to begin the TMI maneuver; unlike DRA 5.0, the HERRO TMI burn would be split into two parts to reduce propellant consumption. TMI Burn 1, which would place the CTCV into an elliptical orbit about Earth, would expend all of the liquid hydrogen in the saddle truss drop tank; the tank would be discarded before TMI Burn 2, which would occur at next perigee.
Shortly after TMI Burn 2, the crew would set the CTCV spinning end-over-end at a rate of 2.7 rotations per minute. This would produce acceleration in the Transhab equal to the pull of gravity on Mars's surface, thus providing an opportunity to confirm that Mars gravity would be sufficient to keep future landing crews healthy. The astronauts would then settle in for a six-month Earth-Mars transfer.
The HERRO team proposed that the crew sleep and work in the Transhab's central core, which would be surrounded by tanks holding about 14 tons of water. By spending 16 hours of every day in the water-lined Transhab core, the astronauts would greatly reduce their exposure to Galactic Cosmic Radiation.
The crew would despin the CTCV as they approached Mars, then would ignite the NTR core stage engines to perform MOI. The planet's gravity would capture the spacecraft into an elliptical, steeply inclined orbit with a period of 12.3 hours, or half a 24.6-hour martian day (known as a sol). The CTCV would reach apoapsis over the sunlit hemisphere of Mars twice per sol, with periapsis occurring twice per sol low over the nightside equator. The crew would then spin up the CTCV to restore Mars-level artificial gravity in the Transhab.
 |
| The CTCV in artificial-gravity configuration. Red arrows indicate the spacecraft's end-over-end rotation. During flight to and from Mars and in Mars orbit the twin solar arrays and large antennas would respectively point continuously toward Sun and Earth. The small antennas would point toward the Truck and Rockhound rovers on Mars. Image credit: NASA. |
As might be expected, the CTCV's orbital parameters were chosen to place it in line-of-sight radio contact at apoapsis with the Trucks and Rockhounds at their landing sites on opposite sides of Mars. This would enable two two-person geologist teams to take turns teleoperating the Trucks and Rockhounds in two work shifts, each lasting up to eight hours per sol, yielding a total teleoperations time per sol of up to 16 hours.
Over the course of the 549-day CTCV stay in Mars orbit, lighting conditions at the Truck/Rockhound sites during the teleoperations shifts would change. At the non-polar sites shifts would start in early morning during the first third of the mission, around noon during the middle third, and in early evening during the final third. The south polar site would be in radio contact for two periods per sol totaling up to 10.6 hours during the first two-thirds of the mission.
The exploration regions centered on the Truck/Rockhound landing sites would each contain several one-kilometer-diameter areas of interest up to 20 kilometers apart. Within these the teleoperators would seek to identify 10-meter-diameter science sites. The rovers would spend up to two weeks within an area of interest and about a sol at each science site.
 |
| Truck rover bearing two Rockhound rovers. The image shows the articulated control arms attached to each wheel, twin stowed Rockhounds, the 10-sided solar array, and twin boom-mounted high-gain antennas. Image credit: NASA. |
 |
| Rockhound rover. The light blue boxes at the corners of its two-part body are navigation cameras and laser terrain mappers. Note the six "whegs," the mid-body hinge, hands with fingers and thumbs, and a very normal-appearing geology hammer. Image credit: NASA. |
The HERRO team described their teleoperated Trucks and Rockhounds in considerable detail. The 800-kilogram Trucks, which could travel at up to 3.6 kilometers per hour, would each have four large independently motorized wheels mounted on "articulated control arms." The arms would permit the Truck to lower its two-meter-square chassis to the surface. This would enable two Rockhounds to disembark for exploration or board for long-range transport or battery charging.
A box on the Truck located behind the Rockhound charging stations would support two low-gain antennas for relaying transmissions to and from the Rockhounds, a mast bearing a vertical four-meter-diameter solar array, and two boom-mounted high-gain antennas for relaying transmissions to and from the CTCV. In addition to batteries, the box would house a drill for sampling tens of meters below the surface and a lab for analyzing samples the drill and Rockhounds collected.
The 145-kilogram Rockhound rover would resemble a mythical centaur. At the front of its horizontal aluminum-frame body would be mounted a vertical robotic torso with shoulders, two arms with elbows and hands, and three cameras in place of a head. It would stand a little more than a meter tall on a level surface.
A motorized "hinge" would divide the rectangular Rockhound body into two 0.5-meter-square parts and a single motor drawing power from batteries would drive six wheel-legs ("whegs") arrayed along its sides. A low-gain antenna for transmissions to and from the Truck, navigation cameras, a small "arsenal" of science instruments, and a rack of tools including a geology hammer would round out its description.
The HERRO team explained that the Rockhound mobility system was based on a "biologically inspired" design developed, built, and tested by Case Western Reserve University. Its movement scheme was modeled on that of the lowly cockroach, which can flex its body and alter its six-legged gait to climb over obstacles taller than it is.
The agile little rover would move at a top speed of about 10 centimeters per second and would be able to climb and descend 45° slopes of loose rocky material. By raising the front half of its body and tilting forward its humanoid torso, it would be able to "rear up" against rock walls to examine and sample features more than two meters above the ground. It would turn its torso 180° to drive backwards and to reach the tools stored on its aft section.
The Rockhound would employ four teleoperational modes. Mode 1, called Traverse to New Location, would see it leave the Truck and move over easy terrain for about an hour at a time. No science would be performed and the rover and its teleoperator on board the CTCV would rely on low-resolution navigation cameras and laser terrain mappers to avoid obstacles. Mode 2, Visual Imagery, would see the Rockhound park in one location while its teleoperator put to use hand tools and microscopic, multispectral, high-resolution visual, and other imaging and sensing systems.
Quiescent/Operator Off Duty, the third teleoperational mode, would see the Rockhound resting in its charging station on board the parked Truck. Charging the Rockhound's batteries would require about 16 hours using an induction charging system that would need no physical contact. The HERRO study team expected that induction might avoid problems created by ever-present airborne Mars dust that could plague a system reliant on a plug and socket. Mode 4, Rockhound Scout Mode, would see the rover move over the surface under teleoperator control for up to eight hours at a time in search of scientifically interesting sites.
In some HERRO documents, the study team suggested that the HERRO mission might include an MSR option. This could take either of two forms: an independent robotic MSR mission or an MSR mission that would rely on the Truck/Rockhound rovers for sample collection.
In the second instance, three MSR lander/ascent vehicles would launch to Mars at the same time as the Truck/Rockhounds. This would add three medium-lift rocket launches to the three slated to occur 26 months ahead of the CTCV launch in the baseline HERRO mission. In both cases, the MSR vehicles would land in the same three regions as the Truck/Rockhound combinations.
In both HERRO MSR scenarios, an independently launched teleoperated sample retrieval vehicle, based possibly on the Orion service module, would collect the sample canisters launched to Mars orbit by the three MSR ascent vehicles and deliver them to the CTCV. Sample retrieval in Mars orbit would, the HERRO team estimated, require retrieval vehicle maneuvers spanning about four months.
As their mission in Mars orbit reached its end, the HERRO mission crew would stop the CTCV's spin, recover the MSR sample canisters, discard the waste-filled food canister, and ignite the three NTR engines to perform TEI. As Mars shrank behind them, they would spin up the CTCV again. About six months later, they would stop the CTCV's spin for the final time, take their places in the uprated Orion, and undock. A short Orion burn would place them on course for Earth-atmosphere reentry.
Meanwhile, the CTCV would swing past Earth. The HERRO study team suggested that it might adjust its course so that it would travel to the Earth-Moon L1 point, where it would park pending possible refurbishment and reuse.
The DRA 5.0 study was completed in 2009 in part to support the activities of the Review of U.S. Human Spaceflight Plans Committee chaired by former aerospace executive Norman Augustine. The Augustine Committee was appointed to advise the new Administration of President Barack Obama concerning NASA's path forward in the 21st century.
The Augustine Committee requested a briefing on the HERRO study. The briefing helped to inform an approach to NASA's future that the Augustine Committee dubbed the "Flexible Path."
As stated at the beginning of this post, the MAWG/MASG envisioned that DRA 5.0 missions would be reached through interim missions — specifically, astronaut stays on board ISS and robotic Mars and piloted Moon missions. The Flexible Path called for new interim missions to be added to this sequence. Although HERRO is not referred to by name in the Augustine Committee's October 2009 final report, among the missions on the Flexible Path was a Mars orbital mission including "joint robotic/human exploration and surface operations [with] sample return."
Adding interim steps to existing U.S. space programs is nothing new. The most obvious example is the addition of Gemini to the NASA piloted program in 1962, a step made necessary when Apollo, which had been conceived initially as mainly an Earth-orbital program, became the U.S. lunar program. Gemini provided opportunities for astronauts, flight controllers, and others to develop new spaceflight skills and for life scientists to determine whether humans could survive in space long enough to reach and return from the Moon.
 |
| View of the Gemini VII spacecraft from the cockpit of Gemini VI-A in Earth orbit, 15 December 1965. Gemini VII and Gemini VI-A performed the first close rendezvous between two piloted spacecraft. Image credit: NASA. |
 |
| Thumbs up: Robonaut II, a humanoid robotic torso developed by NASA Johnson Space Center (JSC) and General Motors, participates in a 2011 field exercise among the volcanic landscapes near Flagstaff, Arizona. Robonaut II's predecessor, the NASA JSC/Defense Advanced Research Projects Agency Robonaut robotic torso, was the inspiration for the HERRO Rockhound torso. Robonaut II is shown here attached to the front of a small remotely operated rover. Image credit: NASA. |
Spaceflight planners suggested interim steps toward humans on Mars long before HERRO. In the 1960s, for example, they proposed piloted Mars and Venus flyby and orbiter missions. In 1993, in the waning days of the abortive Space Exploration Initiative, NASA GRC's Geoffrey Landis, a HERRO study participant, proposed a scenario he dubbed "Footsteps to Mars." These and other proposed interim missions leading toward humans on Mars can be explored by following the links in the "More Information" section below.
In the years since the 2009 DRA 5.0 and HERRO studies, NASA robotic Mars missions have displayed both the capabilities and limitations of robotic landers and rovers on Mars that are remotely operated from distant Earth. The Curiosity lander, which reached Mars on 6 August 2012, proved the capabilities of its aeroshell and skycrane systems. As of July 2022, after nearly a decade on Mars, the Curiosity rover had traversed only 28.15 kilometers.
Lunar and planetary surface teleoperations remain of interest both inside and outside NASA. In the years since the HERRO study, astronauts on board the ISS in Earth orbit have teleoperated robots on Earth. The lunar-orbiting Gateway station, now under development in NASA's Artemis lunar program, is intended to support teleoperation of exploring robots on the Moon.
Sources
Human Exploration of Mars Design Reference Architecture 5.0, NASA-SP-2009-556, Mars Architecture Steering Group, B. Drake, editor, July 2009.
COMPASS Final Report: Human Exploration Using Real-Time Robotic Operations (HERRO) — Rockhound Design, CD-2009-34, NASA Glenn Research Center/Case Western Reserve University/Carnegie Mellon University, August 2009.
COMPASS Final Report: Human Exploration Using Real-Time Robotic Operations (HERRO) — Truck Design, CD-2009-35, NASA Glenn Research Center/Case Western Reserve University/Carnegie Mellon University, August 2009.
COMPASS Final Report: Human Exploration Using Real-Time Robotic Operations (HERRO) — Crew Telerobotic Control Vehicle (CTCV) Design, CD-2009-36, NASA Glenn Research Center/Case Western Reserve University, September 2009.
Seeking a Human Spaceflight Program Worthy of a Great Nation, Review of U.S. Human Spaceflight Plans Committee, October 2009.
"HERRO (Human Exploration Using Real-Time Robotic Operations): A Robotically Intensive Strategy for Human Exploration," G. Schmidt and Steve Oleson, NASA Glenn Research Center, presentation materials, 28 October 2009.
"HERRO: A Science-Oriented Strategy for Crewed Missions Beyond LEO," AIAA-2010-69, G. Schmidt, G. Landis, S. Oleson, S. Borowski, and M. Krasowski; paper presented at the 48th AIAA Aerospace Sciences Meeting in Orlando, Florida, 4-7 January 2010.
"Human Exploration of Mars Design Reference Architecture 5.0," JSC-CN-19120, B. Drake, S. Hoffman, and D. Beaty; paper presented at the IEEE Aerospace Conference in Big Sky, Montana, 6-13 March 2010.
"Human Exploration Using Real-Time Robotic Operations (HERRO) — Crew Control Vehicle (CTCV) Design," AIAA-2010-6817, S. Oleson, M. McGuire, L. Burke, D. Chato, J. Fincannon, G. Landis, C. Sandifer, J. Warner, G. Williams, T. Colozza, J. Fittje, M. Martini, T. Packard, D. McCurdy, and J. Gyekenyesi; paper presented at the 46th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exposition in Nashville, Tennessee, 25-28 July 2010.
"HERRO Missions to Mars and Venus using Telerobotic Surface Exploration from Orbit," G. Schmidt, G. Landis, and S. Oleson; paper presented at the AIAA Space 2011 Conference & Exposition in Long Beach, California, 26-29 September 2011.
More Information