 |
| The 12 images and captions that accompany this post are a post-within-a-post. R. R. Titus, author of the study discussed in the main post text, did not describe his Flyby-Landing Excursion Mode (FLEM) spacecraft, so these images constitute a plausible guess. They draw inspiration from the 1966 NASA Planetary JAG piloted Mars/Venus flyby design; the SIM Bays used to explore the Moon from lunar orbit during Apollos 15, 16, and 17; Orbital Workshop concepts; the informed imagination of their creator, artist William Black; and sundry inputs from the post author. In the image above, a stack assembled in Earth orbit from three modified Saturn S-IVB rocket stages and the FLEM spacecraft undergoes final checks before beginning Earth-departure maneuvers. |
 |
| This dramatic image is 21st-century artist William Black's tribute to a very similar hand-painted NASA image of the 1960s. Earth-orbit departure would require three S-IVB stage burns at perigee over about two days. Because of this, the first and second S-IVBs (center left and lower left) would not be in view when the third S-IVB ignited its J-2 engine. After engine shutdown, the third S-IVB would detach and vent leftover propellants to nudge its course so that it would not follow the FLEM spacecraft to Mars. |
Next came Apollo. NASA conducted four piloted preparatory missions in 1968-1969 ahead of the first lunar landing attempt. Apollo 7 (October 1968), launched on a two-stage Saturn IB rocket, tested the Command and Service Module (CSM) in Earth orbit. The CSM comprised a drum-shaped Service Module (SM) and the conical Command Module (CM) bearing its three-man crew.
As in biological evolution, contingency played a role in spaceflight evolution: for example, Apollo 8, intended originally as a Saturn V rocket-launched high-Earth-orbit test of the CSM and the bug-like Lunar Module (LM) moon lander, became a CSM-only lunar-orbital mission after the LM was delayed and the Soviet Union appeared close to launching a cosmonaut around the moon.
The Apollo 8 astronauts reached lunar orbit on Christmas Eve 1968. In addition to forestalling Soviet attempts to upstage the first Apollo lunar landing mission, Apollo 8's 10 lunar orbits tested upgrades made to the Manned Space Flight Network, NASA's world-wide radio communications and tracking system, and gave console operators in Mission Control early experience in supporting a piloted lunar mission. The Apollo 8 CSM left lunar orbit on Christmas Day 1968, and splashed down in the Pacific Ocean on 27 December 1968.
Apollo 9 (March 1969) saw the first Earth-orbital test of the LM and CSM together. Apollo 10 (May 1969) was a dress-rehearsal in low-lunar orbit for Apollo 11 (July 1969), the first piloted lunar landing.
Apollo 11 is perhaps best understood as an engineering mission; it was a cautious end-to-end test of the Apollo system with a single two-and-a-half-hour moonwalk and only limited science objectives. Apollo 12 (November 1969) demonstrated the pin-point landing capability required for pre-mission geologic traverse planning by setting down near a known point on the moon: specifically, the Surveyor III automated soft-lander, which had landed in April 1967. It also saw a pair of moonwalks lasting nearly four hours each and deployment of the first Apollo Lunar Scientific Experiment Package (ALSEP).
Apollo 13 (April 1970), the first science-focused mission, suffered a crippling explosion midway to the Moon, scrubbing its lunar landing, but its crew's safe return to Earth demonstrated the Apollo system's maturity and the Apollo team's experience. Apollo 14 (January-February 1971) included two moonwalks, each lasting more than four-and-a-half hours. They included a strenuous 1.3-kilometer trek through the hummocky ejecta blanket surrounding 300-meter-wide Cone Crater, a natural drill hole in the scientifically important Fra Mauro Formation.
Apollo 15 (July-August 1971), Apollo 16 (April 1972), and Apollo 17 (December 1972), designated "J" missions, featured a host of evolutionary improvements. Beefed-up LMs permitted surface stay times of up to three days at complex and challenging landing sites, heavier returned lunar samples, and more complex ALSEPs. Space suit improvements and Boeing's Lunar Roving Vehicle enabled geologic traverses ranging over kilometers of the lunar surface. Each "J" mission CSM included a suite of sensors which its pilot could turn toward the moon. Apollo 15 visited the Hadley Rille/Apennine Mountains area; Apollo 16 the central Nearside Lunar Highlands; and Apollo 17, Taurus-Littrow, on the edge of Mare Serenitatis.
 |
| Conceptual FLEM spacecraft. A black-and-white band midway along its hull marks where it will split in two as it nears Mars. To the left of the band is the Mars Orbiter (R. R. Titus called it the "excursion module"); to the right, the Flyby Spacecraft (the "parent" spacecraft). The Orbiter mission module has a single deck with living and working space for two astronauts; the Flyby Spacecraft, two decks with room for four crew. |
One path would see Moon missions continue more or less indefinitely, growing ever more capable and culminating in a permanent lunar base in the 1980s. Alternately, NASA might repurpose Apollo hardware to build, launch, and maintain an evolutionary series of space stations in Earth orbit.
The space station path appeared pedestrian compared to the lunar base path, yet it offered great potential for long-term future exploration. This was because it promised to prepare astronauts and spacecraft for long-duration missions in interplanetary space. In 1965-1966, NASA advance planners envisioned a series of Earth-orbiting space workshops based on the Apollo LM and the Saturn IB rocket S-IVB stage. Apollo CSMs would ferry up to six astronauts at a time to the workshops for progressively longer stays.
Some planners thought that NASA should jump straight from the early space workshops to piloted Mars landing missions using nuclear-thermal propulsion, but others called for a conservative continuation of the evolutionary approach. If the latter had won the day, the mid-1970s might have seen a new-design space station climb to Earth orbit atop an improved Saturn V rocket. Derived from Apollo hardware and new technology tested on board the orbiting workshops, the station would in fact have constituted a prototype interplanetary Mission Module. A crew might have lived on board without resupply or visitors for almost two years to help prepare NASA for its first piloted Mars voyage.
In keeping with the evolutionary approach, the first piloted voyage beyond the Moon might have been a Mars flyby with no piloted Mars landing. The piloted Mars flyby spacecraft, which would have carried a cargo of robotic Mars probes, would have been built around the Mission Module tested in Earth orbit. The mission might have commenced as early as late 1975, when an opportunity to launch a minimum-energy Mars flyby was due to occur.
As they raced past Mars in early 1976, the four flyby astronauts would have released automated probes and turned a suite of sensors mounted on their spacecraft toward Mars and its irregularly shaped moons Phobos and Deimos. They would have reached their greatest distance from the Sun in the Asteroid Belt, so asteroid encounters would have been a possibility. As their Sun-centered elliptical orbit brought them back to Earth's vicinity in 1977, they would have separated in an Apollo CM-derived Earth-return capsule and reentered Earth's atmosphere.
In addition to observing Mars close up, the astronauts would have continued the effort, begun in earnest during Gemini flights and continued on board the Earth-orbiting workshops and prototype interplanetary Mission Module, to determine whether extended piloted missions were medically feasible. The flyby crew might have confirmed, for example, that artificial gravity is a must during years-long interplanetary voyages. Their results would have shaped the next interplanetary mission, which might have taken the form of a piloted Mars orbiter in the spirit of Apollo 8 and Apollo 10, or, if the space agency felt sufficiently confident in its abilities, a Mars orbital mission with a short piloted excursion to the martian surface in the spirit of Apollo 11.
 |
| Sixty days from Mars: two of the FLEM mission's astronauts transfer to the Orbiter. After exhaustive systems checks, they fire explosive bolts to cast off the two-part "spacer" linking their spacecraft and the drum-shaped Flyby Spacecraft. A docking mechanism retracts, then small thrusters push the two spacecraft apart. |
 |
| The Orbiter backs away from the Flyby Spacecraft. The two astronauts on the Flyby Spacecraft inspect the Orbiter's exterior and transmit television of its departure to Mission Control on Earth. |
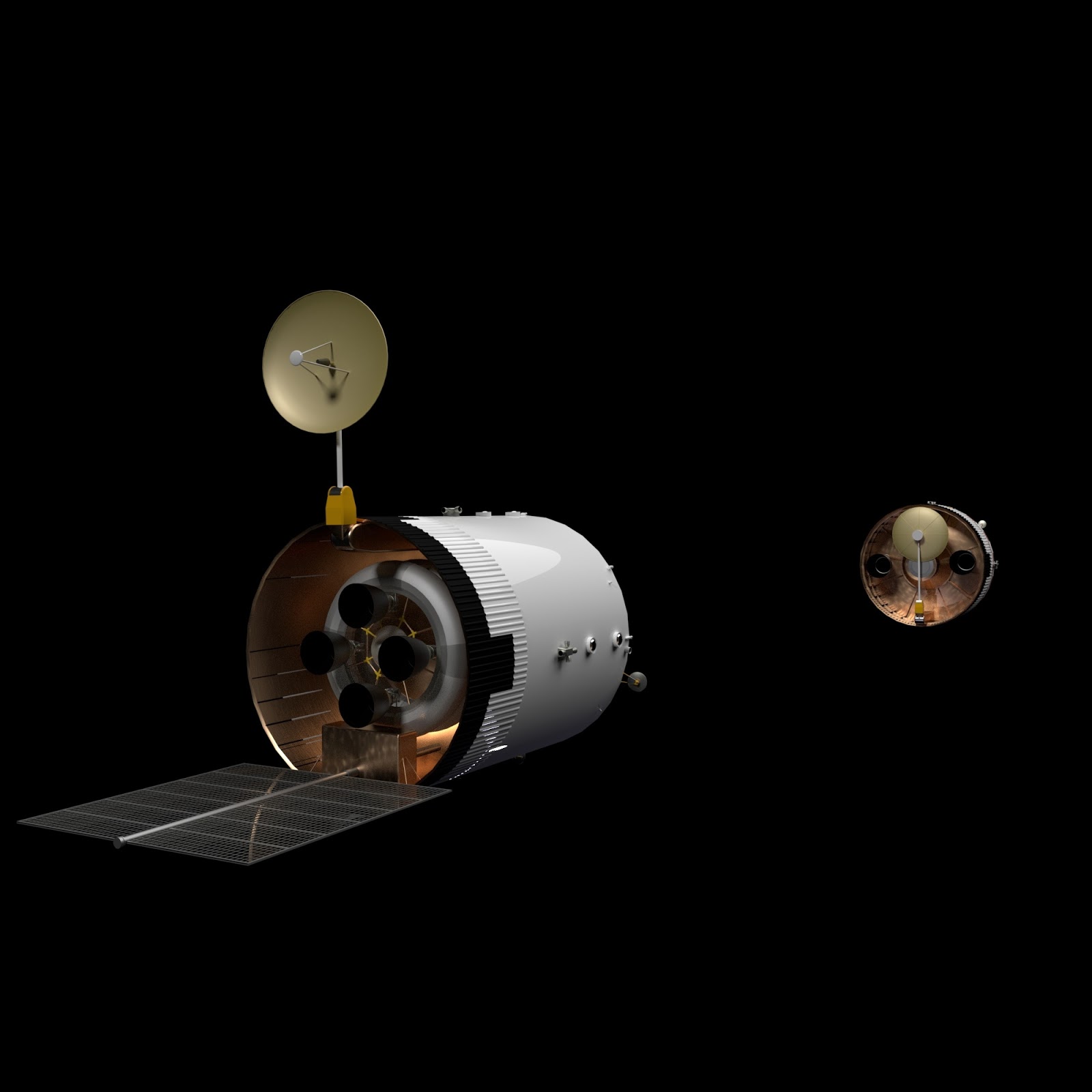 |
| Using its Apollo-type thruster quads, the Orbiter turns away from the Flyby Spacecraft, positioning itself for the separation burn that will cause it to reach Mars 16 days ahead of the Flyby Spacecraft. Visible on both are engines based on the Apollo Lunar Module descent engine design. The four engines on the Flyby Spacecraft are part of the Earth Return Module (ERM) braking stage. The ERM, an Apollo CM with seating for four astronauts, is linked by its nose-mounted docking unit to the aft deck of the Flyby Spacecraft Mission Module. Life support gas and liquid tanks supplying the Mission Module surround the CM; these act as radiation shielding, allowing the CM to serve double-duty as a solar storm shelter. |
Titus explained that, in the "standard stopover mode," a label that encompassed Mars orbital and landing missions, all major maneuvers would involve the entire Mars spacecraft. This meant that the Mars spacecraft would need a large mass of propellants, which in turn meant that many expensive heavy-lift rockets would be required to launch the spacecraft, its propellants, and its Earth-orbit departure stages into Earth orbit for assembly.
Propellant mass required would vary greatly from one Earth-Mars transfer opportunity to the next over a roughly 15-year cycle because Mars has a decidedly elliptical orbit. Because of this, the Mars spacecraft and the sequence of launches needed to boost its components and propellants into Earth orbit would have to be redesigned for each standard stopover mode Mars mission.
The United Aircraft engineer added that errors or malfunctions during standard stopover mode "high-risk" Mars capture and escape maneuvers could result in "complete mission failure" because the entire spacecraft would be involved. Because the Mars spacecraft would be very massive already, it would be difficult and costly to include extra propellants that would enable a mission abort that could save the crew.
Titus noted that required propellant mass might be reduced and made to vary less over multiple Earth-Mars transfer opportunities if the spacecraft skimmed through the martian upper atmosphere to slow down and capture into Mars orbit (that is, if it performed aerocapture). If, however, artificial gravity were found to be necessary for crew health, then stowing a spinning artificial-gravity system of sufficient radius behind an aerocapture heat shield would probably prove infeasible. The mission would then have to rely entirely on propulsive braking.
Titus explained that his FLEM concept, in addition to forming a natural evolutionary extension of piloted Mars flybys, would address many inherent problems of the standard stopover mode. One part of the FLEM spacecraft, the "parent" spacecraft, would not capture into Mars orbit. It could include a spinning artificial-gravity system. The other part, the "excursion module," would capture into Mars orbit using chemical rockets or, perhaps, by skimming through the martian atmosphere behind an aerocapture heat shield.
 |
| Orbiter alone: immediately following the separation burn, the two astronauts aboard the Orbiter deploy and orient its solar array and high-gain dish antenna; they are identical to those on the Flyby Spacecraft. The array points at the Sun, out of view beyond the upper left corner of the image, while the antenna aims at the bright blue-white dot that is Earth. Just above the Orbiter, half-lit Mars is visible. Also in view are the Orbiter's four science pallets (covered by white rectangular panels), gray airlock hatch, and yellow spacewalk handholds. The airlock, partly surrounded by propellant tanks, serves as the Orbiter's solar storm shelter. |
In the latter case, the excursion module would not need a large mass of propellants to capture into Mars orbit, making it the least massive of the two FLEM spacecraft. It would thus fire rockets to speed up and reach Mars ahead of the parent spacecraft.
Titus calculated that separation 60 days ahead of the Mars flyby would enable the excursion module to reach the planet 16 days ahead of the parent spacecraft; separation 30 days before flyby would enable it to reach Mars when the parent spacecraft was nine days behind it. While it awaited the arrival of its parent, the excursion module might remain in Mars orbit or all or part of it might land on Mars for a stay of several days.
 |
| In Mars orbit: during the Mars orbit capture burn, the Orbiter crew stowed the solar array and high-gain antenna to protect them from deceleration damage. Soon after achieving Mars orbit, they re-deployed both, then ejected the panels covering the Orbiter's instrument pallets. The two forward pallets include identical suites of high-resolution film cameras; the aft pair, identical suites of spectrometers. Identical pallets provide redundancy if instruments fail. As the Orbiter circles Mars, passing in and out of daylight, its solar array can temporarily lose lock on the Sun; in the image above, this has occurred, so the array reflects a crater under scrutiny by the Orbiter's instruments. |
 |
| The Orbiter crew is not inactive as the Mars-facing instrument pallets record images and other data. In addition to maintaining Orbiter systems, they use handheld and porthole-mounted cameras to capture images of "variable phenomena." These include clouds, dust storms, morning fogs and frosts, and the retreating or expanding edges of the seasonally variable polar ice caps. The Orbiter's single-deck Mission Module has eight portholes. |
Assuming that the mission took place as planned, the excursion module would ignite its rocket motors as the parent spacecraft passed Mars to depart Mars orbit and catch up with it. Following rendezvous, docking, and crew transfer, the excursion module would be cast off.
 |
| Sixteen days after Orbiter capture into Mars orbit, the Flyby Spacecraft raced past Mars. The Orbiter crew ejected their spacecraft's solar array and ignited its engines to catch up with their ride home. In this image, the two astronauts on board the Flyby Spacecraft (left) have turned on rendezvous lights. The Orbiter engines glow red after the "chase" maneuver. Its antenna is positioned so it can serve as a handrail should an emergency spacewalk to the Flyby Spacecraft be needed. The Orbiter halts near the Flyby Spacecraft, then its crew steps outside to collect film cassettes from the four pallets. The Flyby Spacecraft crew records the spacewalk and inspects the Orbiter exterior for damage that might interfere with docking. The Orbiter astronauts stow the recovered cassettes inside their spacecraft, then dock with the Flyby Spacecraft. The reunited FLEM astronauts then transfer film cassettes to the Flyby Spacecraft and discard the Orbiter. |
The maneuver would be optional in the sense that, if it could not occur, the FLEM spacecraft's Sun-centered orbit would return it to Earth, though after a longer than expected trip. During return to Earth after a powered flyby, the FLEM spacecraft would pass as close to the Sun as orbits the planet Mercury.
Titus determined that a powered-flyby maneuver in 1971 would have almost no effect on spacecraft mass at Earth-orbit departure — both the standard ballistic and powered-flyby FLEM spacecraft would have a mass of about 400,000 pounds — but would slash trip time from 510 to 430 days. The most dramatic improvement would occur in 1978, when the ballistic-flyby FLEM spacecraft's mass would total nearly two million pounds and its mission would last 540 days. The powered-flyby FLEM spacecraft would have a mass of just 800,000 pounds at the start of Earth-orbit departure and its mission would last only 455 days.
The FLEM concept apparently influenced NASA piloted flyby studies that occurred under the auspices of the Planetary Joint Action Group (JAG). The NASA Headquarters-led Planetary JAG, which met between 1965 and 1968, included representatives from NASA Marshall Space Flight Center, NASA Kennedy Space Center, and the NASA Manned Spacecraft Center, as well as Washington, DC-based planning contractor Bellcomm. The Planetary JAG's work will be described in detail in subsequent posts.
 |
| FLEM was a mission mode without a spacecraft for accomplishing it — but no longer. For this post, artist William Black worked with the author to create a plausible FLEM spacecraft based on flown and conceptual 1960s space hardware. In keeping with the post's overriding theme, we put FLEM into an evolutionary program. We assumed at first that NASA would launch a piloted Mars flyby in 1975 and follow it in 1978 with a FLEM mission that would include a powered Mars flyby. As explained in the post text, a powered flyby would reduce mission duration and, in 1978, cut by more than half the quantity of propellants needed to reach Mars. It would, however, also cause the FLEM Flyby Spacecraft to pass as near the Sun as the orbit of Mercury. Closest approach to the Sun would occur in 1979, during a period of maximum solar activity. Because of this, we rejected both 1978 flyby opportunity and the powered flyby. We chose instead a Mars flyby launched in 1981 for our FLEM mission, when solar activity would be in decline. Earth-return speed would be high (about 50,000 feet per second), so we decided to employ a maneuver pioneered during the 1975 flyby: a braking burn during Earth approach to reduce reentry speed to Apollo lunar-return speed (36,000 feet per second). |
 |
| The two images above show the Apollo CM-based Earth-Return Module (ERM) and its braking stage during final Earth approach. The ERM/braking stage would have backed out of its "hangar" in the Flyby Spacecraft two days before the events portrayed here. In the top image, the braking stage engines have just shut down after the braking burn; their engine bells still glow red. In the bottom image, the spent braking stage has been cast off. Below the ERM, city lights outline the Indian subcontinent; in the background, over the western Pacific, dawn glows. The ERM will soon streak through the atmosphere over China and Japan, deploy four parachutes, and descend to a mid-morning splashdown southwest of Hawaii, completing the first FLEM voyage and a new evolutionary step toward humans on Mars. |
Sources
Manned Mars and.or Venus Flyby Vehicle Systems Study — Final Briefing Brochure, SID 65-761-6, North American Aviation, 18 June 1965.
"FLEM - Flyby-Landing Excursion Mode," AIAA Paper 66-36, R. R. Titus; paper presented at the 3rd AIAA Aerospace Sciences Meeting in New York, New York, 24-26 January 1966.
Planetary Exploration Utilizing a Manned Flight System, Planetary Joint Action Group, NASA Office of Manned Space Flight, 3 October 1966.
"Manned Expeditions to Mars and Venus," E. Z. Gray and F. Dixon, Voyage to the Planets, Proceedings of the Fifth Goddard Memorial Symposium, 14-15 March 1967, pp. 107-135.
Wonderful Life: The Burgess Shale and the Nature of History, Stephen Jay Gould, W. W. Norton & Co., 1990.
More Information
After EMPIRE: Using Apollo Technology to Explore Mars and Venus (1965)
Relighting the FIRE: A 1966 Proposal for Piloted Interplanetary Mission Reentry Tests
To Mars by Way of Eros (1966)
Apollo Ends at Venus: A 1967 Proposal for Single-Launch Piloted Venus Flybys in 1972, 1973, and 1975
Triple-Flyby: Venus-Mars-Venus Piloted Missions in the Late 1970s/Early 1980 (1967)














